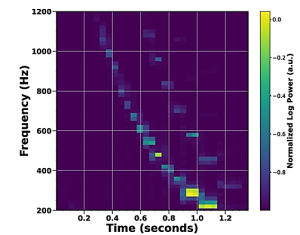
Multielectron bubbles are gas cavities suspended in liquid helium, with electrons confined to their inner surfaces, creating a distinctive curved two-dimensional electron system (2DES). In our experiments, we apply an external AC electric field to excite oscillations in the size and shape of these bubbles. We identify the corresponding normal modes and their frequencies, which show good agreement with analytical predictions. This experimental approach offers a powerful quantitative method to probe the fundamental properties of curved 2DES systems.
P. K. Rath, D. K. Pradhan, U. Chowdhury, J. V. Loock, J. Tempere, Y. Huang, V. Vadakkumbatt, and A. Ghosh, Electric field induced oscillations in multielectron bubbles in liquid helium-4, Physical Review B, 112, 024510, 2025. DOI: https://doi.org/10.1103/cwjm-zsgz
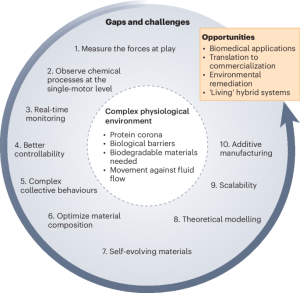
Since the discovery in 2004, nanomotors have witnessed tremendous scientific advancement — from understanding diverse propulsion mechanisms to exploring collective behaviors and, ultimately, to developing applications in biomedicine and environmental remediation. This Perspective traces the evolution of nanomotor research and outlines the major challenges that lie ahead, including the development of advanced characterization methods, precise motion control strategies, innovative materials, robust theoretical models, and clinically viable in vivo applications.
These challenges underscore the current limitations of synthetic nanomotors while revealing exciting opportunities to revolutionize theranostics and engineer hybrid “living” systems. To frame this vision, we introduce the concept of systems materials — a framework encompassing interacting functional materials that span molecular to macroscopic scales. Ultimately, this Perspective seeks to motivate future researchers to push the boundaries of both fundamental understanding and technological innovation, driving a transformative shift in the field of nanomotor science.
S. Chen, D. E. Fan, P. Fischer, A. Ghosh, K. Göpfrich, R. Golestanian, H. Hess, X. Ma, B. J. Nelson, T. P. Padial, J. Tang, K. Villa, W. Wang, L. Zhang, A. Sen and S. Sánchez, A roadmap for next-generation nanomotors, Nature Nanotechnology, 20, pages990–1000, 2025. DOI: doi.org/10.1038/s41565-025-01962-9.
CalBots are magnetically actuated nanorobots designed to navigate deep within dentinal tubules, where they form self-hardening bioceramic plugs to alleviate dental hypersensitivity. By accessing regions beyond the reach of conventional therapies, CalBots provide long-lasting relief through magnetically guided biomineralization. This innovative approach has the potential to transform the treatment of tooth sensitivity and may pave the way for broader applications in hard tissue repair.
S. Peddi, P. Hegde, P. Reddy, A. Barman, A. Barik, D. Dasgupta, and A. Ghosh, Directed Self-Assembly of Magnetic Bioceramic Deep Inside Dentinal Tubules May Alleviate Dental Hypersensitivity, Advanced Science, 12, 71952, 2025, https://doi.org/10.1002/advs.71952.
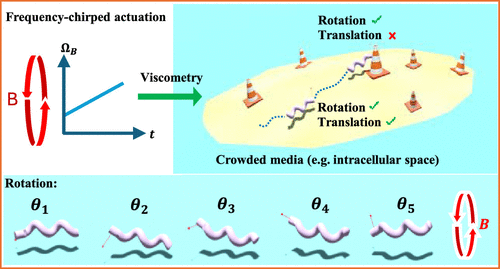
Fast, precise, and spatially resolved measurements of mechanical properties in complex and heterogeneous microscale environments are crucial for advancing multiple areas of science. Achieving this, however, poses significant technological challenges, as the measurement approach must offer both high sensitivity and rapid response to capture meaningful data with spatial resolution comparable to the probe’s dimensions.
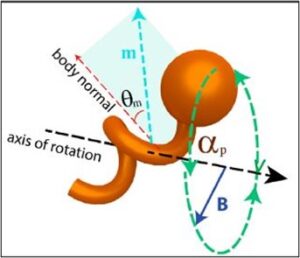
In this work, we demonstrate that employing a frequency-chirped external magnetic drive with chiral magnetic microbots enables micron-scale spatial resolution and sensitivities better than a few cP/Hz. By simultaneously monitoring two degrees of freedom, it becomes possible to quantify local viscosity even when the microbot’s motion is strongly restricted.
We validate this technique in model systems and further generate spatial viscosity maps in biologically relevant, heterogeneous, and crowded environments such as the cell cytoplasm. Overall, our results establish chiral magnetic microbots as a next-generation active micromechanical measurement platform, ideally suited for probing the complex and crowded environments commonly found in nature.
S. Goswami, S. Mukherjee, N. Ahmed, M Sreepadmanabh, T. Bhattacharjee, R. Bhat, D. Saini, and A. Ghosh, Frequency-Chirped Actuation of Chiral Magnetic Microbots for Viscosity Mapping in Heterogenous Media: From Model Fluids to Living Cells ACS Nano, 19, 41, 36373–36383, 2025, doi: 10.1021/acsnano.5c09448.
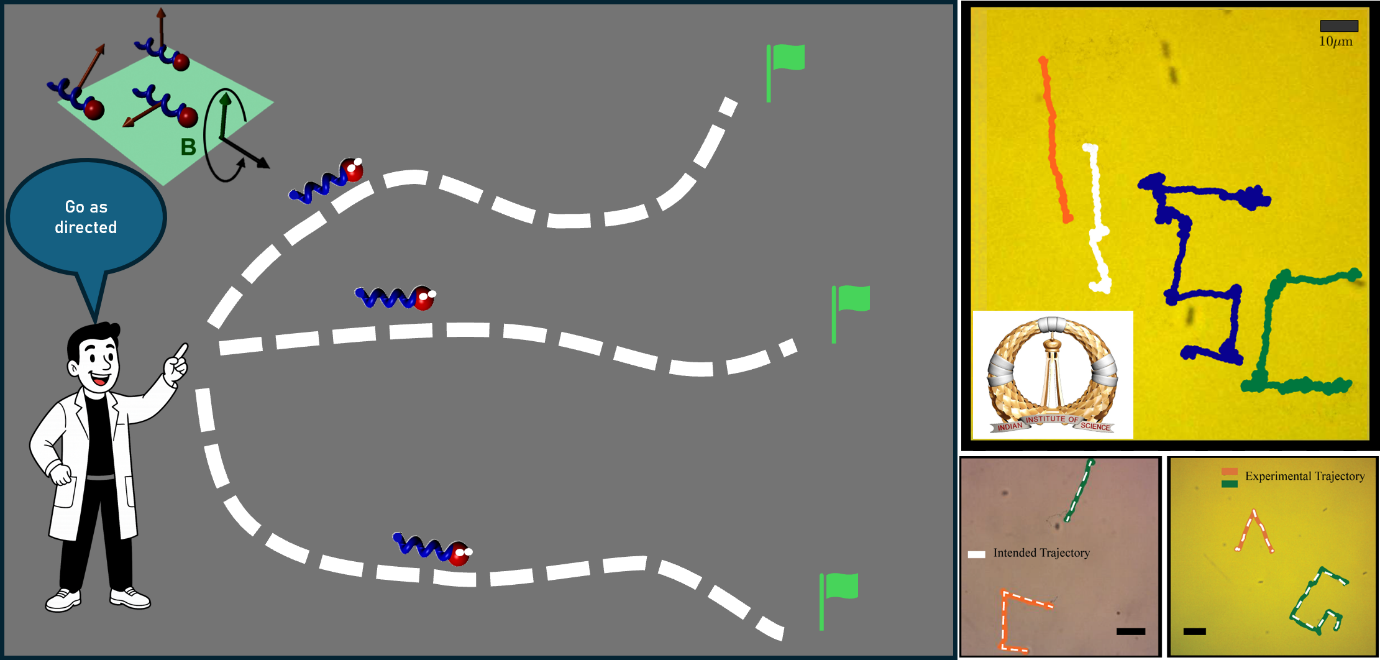
At the nanoscale, controlling tiny robots or nanobots poses a major challenge. Unlike larger robots, which can be guided individually using radio signals or onboard electronics, nanobots are far too small for such technology. Because of their size, they usually respond to a global field (like a magnetic or electric field) applied to the whole group, making it difficult to move one bot without affecting the others, especially when they are identical. Researchers at the Centre for Nano Science and Engineering (CeNSE), IISc, led by Ambarish Ghosh, have now developed a novel way to control individual nanobots within a swarm using an ingenious trick: intermittent randomisation. By briefly disrupting each nanobot’s orientation at random intervals, they can make each bot traverse slightly differently, even though they are all exposed to the same global control field. This subtle difference allows for precise navigation of individual bots without needing to alter their design or add internal electronics.
This approach opens up new possibilities in medicine, manufacturing, and computing. Imagine performing surgery deep within the body using nanobots, assembling parts on a chip with high precision, or delivering drugs directly to individual cells. These futuristic ideas are now closer to reality thanks to this strategy for individual nanobot control, paving the way for highly advanced applications in health, electronics, and more.
Goyal, R., Behera, J., Mandal, P. et al. Externally controlled intermittent randomization enables complex navigation of multiple nanobots. Nat Commun 16, 2700 (2025).
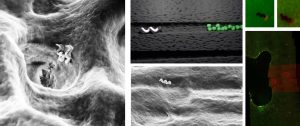
In this collaborative work, the authors developed SPION-functionalized nanorobots (SPIONs-NRs) that are: exceptionally stable against magnetic agglomeration, highly maneuverable through crowded biological environments like the extracellular matrix, capable of delivering magnetic hyperthermia-induced localized heating for targeted cell therapy. At just ~400 nm in diameter, these nanorobots glide through dense biological tissue with ease, paving the way for minimally invasive therapeutic applications from cancer treatment to precision interventions in complex tissues. A step forward in realizing intelligent, swarm-capable nano-vehicles for future theragnostics.
Behera, Suvra S. Laha, D. Dasgupta, S. Goswami, S. Mukherjee, A. Jaiswar, P. Modak, M. Banerjee, R. V. Ramachandran, K. I. Morozov, A. M. Leshansky, R. Bhat, D. K. Saini, A. Ghosh, ACS Nano, 19, 18, 17785–17795, 2025. 10.1021/acsnano.5c03144
 The use of magnetic field-controlled nanobots at the nano-scale can effectively eliminate bacteria deep within dentinal tubules, enhancing the success of root canal treatments. These procedures aim to treat tooth infections by removing infected tissue and flushing the tooth with antibiotics or chemicals. However, the current methods often fail to completely eradicate all bacteria, particularly antibiotic-resistant strains like Enterococcus faecalis, which remain concealed within microscopic canals called dentinal tubules. In the study published in Advanced Healthcare Materials, we at QuAN2M lab developed helical nanobots comprised of silicon dioxide coated with iron. These nanobots could be manipulated using a device generating a low-intensity magnetic field. The nanobots’ movement was tracked under a microscope when injected into extracted tooth samples. By adjusting the magnetic field frequency, the researchers were able to control the nanobots’ precise motion and facilitate their penetration into the dentinal tubules. Significantly, the team could induce heat generation on the nanobots’ surface using the magnetic field, which effectively killed bacteria in close proximity. This method surpasses previous techniques like ultrasound or laser pulses, which can only penetrate a maximum distance of 800 micrometres before their energy dissipates. The nanobots, on the other hand, demonstrated penetration capabilities of up to 2,000 micrometres. The use of heat for bacterial elimination also offers a safer alternative to harsh chemicals or antibiotics. Our lab has conducted successful and safe tests of dental nanobots in mice models. We are also developing a compact medical device that can be easily inserted into the mouth, enabling dentists to inject and manipulate the nanobots during root canal treatments. Future research will focus on regulatory and clinical trials.
The use of magnetic field-controlled nanobots at the nano-scale can effectively eliminate bacteria deep within dentinal tubules, enhancing the success of root canal treatments. These procedures aim to treat tooth infections by removing infected tissue and flushing the tooth with antibiotics or chemicals. However, the current methods often fail to completely eradicate all bacteria, particularly antibiotic-resistant strains like Enterococcus faecalis, which remain concealed within microscopic canals called dentinal tubules. In the study published in Advanced Healthcare Materials, we at QuAN2M lab developed helical nanobots comprised of silicon dioxide coated with iron. These nanobots could be manipulated using a device generating a low-intensity magnetic field. The nanobots’ movement was tracked under a microscope when injected into extracted tooth samples. By adjusting the magnetic field frequency, the researchers were able to control the nanobots’ precise motion and facilitate their penetration into the dentinal tubules. Significantly, the team could induce heat generation on the nanobots’ surface using the magnetic field, which effectively killed bacteria in close proximity. This method surpasses previous techniques like ultrasound or laser pulses, which can only penetrate a maximum distance of 800 micrometres before their energy dissipates. The nanobots, on the other hand, demonstrated penetration capabilities of up to 2,000 micrometres. The use of heat for bacterial elimination also offers a safer alternative to harsh chemicals or antibiotics. Our lab has conducted successful and safe tests of dental nanobots in mice models. We are also developing a compact medical device that can be easily inserted into the mouth, enabling dentists to inject and manipulate the nanobots during root canal treatments. Future research will focus on regulatory and clinical trials.
Dasgupta D, Peddi S, Saini DK, Ghosh A, Mobile Nanobots for Prevention of Root Canal Treatment Failure, Advanced Healthcare Materials (2022).
Inspired by molecular motors, we design an artificial swimmer powered by magnetic fields.
Designing microrobots that mimic living organisms is a dream, and one of the challenges in achieving it is figuring out how to move them in a medium. For a successful swimmer at a micron scale in fluid, self-propulsion is necessary. Self-propulsion is when each particle converts energy in the environment into persistent or directed motion.
When we have a collection of such particles, it is called an active matter system. One may have seen flocking birds exhibiting a dizzying array of patterns in the skies or a school of fish in the oceans. This swarming behaviour is also typical in small-length scales like bacteria and cells. Most naturally occurring beings exhibit self-propelled motion in search of food or escape the predator.
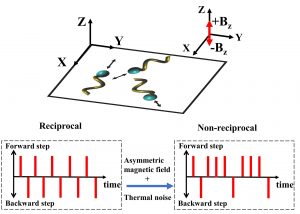
However, at microscopic scales, defined as Low Reynolds number, the motion is entirely dominated by the viscosity (friction) of the fluid and particle locomotion is difficult. This is due to the Scallop theorem, which states that a time-symmetric motion doesn’t produce a net displacement. If we imagine a clamshell opening and closing in a cycle that looks the same, whether the video is played forward or backwards, it is called a reciprocal swimmer and will not go anywhere.
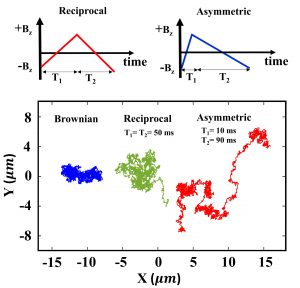
We have designed a system of artificial swimmers energised by magnetic fields, which will overcome the Scallop theorem’s limitation using the Brownian motor principle. The inspiration comes from the molecular motors, which can move even in the face of a crowded and noisy environment. Our experimental system is based on ferromagnetic micro helices driven by oscillating magnetic fields, where they perform an alternate clockwise (CW)- counterclockwise (CCW) rotation sequence. We use asymmetric magnetic fields and noise in the medium to break this reciprocal sequence symmetry. The swimmer’s net displacement depends on the timescales associated with the magnetic fields, i.e. how fast or slow the field oscillates. We perform numerical simulations and experiments to show control over the motility of the swimmers. This new class of micron-scale magnetically powered artificial swimmers provide a promising experimental platform to simulate diverse, active matter phenomena in the natural world. Additionally, this system is bio-compatible and manoeuvrable in various biological media. This allows us to envision futuristic biomedical applications emerging from self-propelled, theragnostic entities deployed in living systems.
Patil, G., Mandal, P., and Ghosh, A., Using Thermal Ratchet Mechanism to Achieve Net Motility in Magnetic Microswimmers, (accepted in Physical Review Letters, October 2022)
 Arrangement of interacting entities under different physical conditions and geometrical constraints plays crucial role in determining the structure and properties of self-organized systems. For most soft materials, the assembly can be understood within the framework of classical physics, while quantum effects are readily evident in molecular systems on solid substrates. Considering entities not only interact with each other, but also to the environment; it is natural to wonder how they self-assemble under flexible (soft) confinements. Also, the role of quantum fluctuations in self-assembly of soft materials is unexplored, which could be important in the development of next generation quantum materials. In this regard, organization of electrons within liquid helium is of great interest where surface deformations of the low surface tension liquid can be balanced by the short-range quantum mechanical repulsion of electrons to the helium atoms. In the simplest case, this results in the formation of nanometer sized bubbles in liquid helium containing single electrons.
Arrangement of interacting entities under different physical conditions and geometrical constraints plays crucial role in determining the structure and properties of self-organized systems. For most soft materials, the assembly can be understood within the framework of classical physics, while quantum effects are readily evident in molecular systems on solid substrates. Considering entities not only interact with each other, but also to the environment; it is natural to wonder how they self-assemble under flexible (soft) confinements. Also, the role of quantum fluctuations in self-assembly of soft materials is unexplored, which could be important in the development of next generation quantum materials. In this regard, organization of electrons within liquid helium is of great interest where surface deformations of the low surface tension liquid can be balanced by the short-range quantum mechanical repulsion of electrons to the helium atoms. In the simplest case, this results in the formation of nanometer sized bubbles in liquid helium containing single electrons.
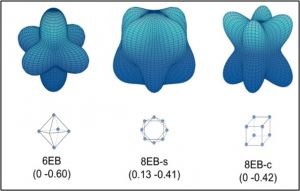
We have discovered two species of nanometer sized bubbles in liquid helium-4 that contain six and eight electrons, stabilized by quantum confinement and surface curvature, with additional effects due to inter-electron electrostatic, quantum exchange and correlation interactions. The electrons are pushed to the cavity walls due to electrostatic interactions and finding their equilibrium configuration closely resembles the Thomson problem: determining the equilibrium configuration of 𝑁 charges constrained to move on the surface of a sphere. They form a versatile, new platform to study self-assembly at the intersection of classical and quantum worlds. These objects were found to be stable for at least 15 milliseconds at 1.5 K and can therefore allow fundamental studies of few-body quantum interactions under soft confinements. They also decorated the quantum vortex lines (defects in liquid helium) and could provide a simpler experimental platform in imaging quantum turbulence due to the ease of continuous generation and easier observation, which can be advantageous over visualization techniques based on SEBs and hydrogen crystallites.
Thomson problem is relevant to many problems of practical significance ranging from structures of viruses and other supramolecular assemblies to arrangement of colloidal particles and aerosols in confined spaces. This novel nanomaterial simultaneously incorporates soft and quantum effects to the Thomason problem. We believe FEBs could be particularly useful as few body quantum simulators, incorporating both charge and spin interactions. It may be possible to store the FEBs in an rf Paul trap, and to investigate them over an extended duration.
Yadav, N., Sen, P. & Ghosh, A. Bubbles in superfluid helium containing six and eight electrons: Soft, quantum nanomaterial. Sci. Adv.7, eabi7128 (2021).
Nanomotors are extremely small devices, which can be manoeuvred remotely by providing appropriate external stimulus, such as magnetic, acoustic, optical fields. Study of nanomotors is of great current interest due to their possible applications in targeted drug delivery, microsurgery and sensing biological macromolecules. A team of researchers from Indian Institute of Science, Bangalore, demonstrated the entry of nanomotors and their controlled movement inside living human cells. A cell, which is the smallest unit of a tissue, is made up of a dense fluid, called the cytoplasm, which houses the cellular organelles, the cytoskeletal network and a host of biological molecules.

These helical shaped nanomotors are made of magnetic material and are at least ten times smaller than the cell which theyenter in. On entering the cell cytoplasm, the nanomotor encounters a highly complex, heterogenous environment. A rotating magnetic field is used to drive the motors inside the cytoplasm, with precise control. Magnetic field, which is widely used in biomedical imaging techniques, such as MRI, is known to be completely benign to living systems. Due to the nature of the cellular interior, the nanomotors often had to be detoured from their path, such as to go around the intracellular roadblocks. The motion and speed of the motors changed in different regions of the cell.
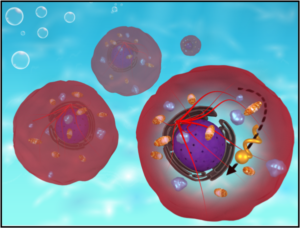
Nanomotors driven by acoustic fields have been moved inside living cells in the past. However, the application of acoustic field, i.e. sound, detaches the cells from the substrate and may even cause stress to the cell. In this respect, the magnetically driven nanomotors studied here provide a crucial advantage. Through extensive viability studies, using fluorescent indicators of cellular health, the cells were found to be undamaged, while the magnetic nanomotor moved through the cell. In addition, the exquisite control with which the magnetic nanomotors could be positioned inside cells have never been demonstrated before. These studies were carried out in cells of a human cervical cancer cell line (HeLa), a non-cancer cell line of endothelial cells (BAEC) and human embryonic kidney cell line (HEK). Magnetically driven helical nanomotors can therefore be used as a promising tool in cell biology studies, and be useful in understanding, diagnosis and treatment of various diseases. As their motion is so well controlled, applications such as localised gene or drug delivery can be explored. They provide an excellent new platform for studying the biophysical nature of the intracellular environment of different cell types in live conditions, in real time.
Fantastic Voyage of Nanomotors into the Cell, Pooyath Lekshmy Venugopalan, Berta Esteban-Fernández de Ávila, Malay Pal, Ambarish Ghosh*, Joseph Wang*, ACS Nano, 2020
Maneuverability of magnetic nanomotors inside living cells M Pal, N Somalwar, A Singh, R Bhat, SM Eswarappa, DK Saini, A Ghosh Advanced Materials 30 (22), 1800429
 An interdisciplinary team of researchers from the Indian Institute of Science (IISc) has used a 3D tumour model and magnetically-driven nanomotors to probe the microenvironment of cancer cells.
An interdisciplinary team of researchers from the Indian Institute of Science (IISc) has used a 3D tumour model and magnetically-driven nanomotors to probe the microenvironment of cancer cells.
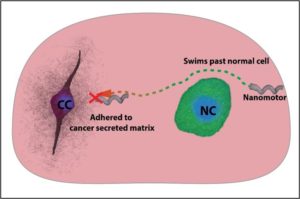
In their work, published in Angewandte Chemie, the team steered helical nanomotors remotely via an external magnetic field through the tumour model to sense, map and quantify changes in the cellular environment. The model comprises both healthy and cancer cells embedded within a reconstituted basement membrane matrix, and mimic the breast cancer environment.
The study highlights a new way of targeting cancer cells by manoeuvring nanomotors inside a tumour and waiting for them to localise in the vicinity of the cancerous site. The extracellular matrix (ECM) is a complex 3D network of proteins and carbohydrates secreted by living cells into their neighbourhood. However, when cancer cells secrete fresh material into the ECM, it disrupts the chemical and physical composition of the native ECM surrounding healthy cells, degrading the local environment. Therefore, understanding how the cellular microenvironment is altered due to cancer cells and measuring these changes quantitatively could be vital in understanding the progression of cancer.
In the current study, the researchers discovered that as the nanomotors approached the cancer cell membrane, they stuck to the matrix more strongly than they would to normal cells. To measure how strongly the nanomotors bound to the matrix, the team calculated the magnetic field strength required to overcome the adhesive force, and move forward. The reason why the nanomotors appear to stick to the cancer cells better is their charged ECM. This may be due to the presence of 2, 3-linked sialic acid, a sugar-conjugated molecule which confers a negative charge on the cancer cell environment, the researchers found. They visualised the distribution of these sugars using fluorescent markers and found that sialic acids were distributed up to 40 micrometres from the cancer cell surface ‒ the same distance until which the nanomotors experienced strong adhesion.
To counter this adhesive effect, the team coated the nanomotors with Perfluorooctyltriethoxysilane (PFO) which shielded them from the charged environment. The coated nanomotors did not stick to the matrix near the cancer cells, whereas the uncoated motors clung to the matrix, confirming the fact that the negatively charged cancer microenvironment interacts with the incoming nanomotors, rendering them immobile.
Nanomotors Sense Local Physicochemical Heterogeneities in Tumor Microenvironments, Debayan Dasgupta, Dharma Pally, Deepak K. Saini, Ramray Bhat* and Ambarish Ghosh*, Angewandte Chemie, 2020
 Souvik’s research focuses on dynamic manipulation of nanomaterials using plasmonics. He, for the first time has managed to move plasmonic nanotweezers which so far were fixed on substrates and pick up colloidal cargoes in two different strategies.
Souvik’s research focuses on dynamic manipulation of nanomaterials using plasmonics. He, for the first time has managed to move plasmonic nanotweezers which so far were fixed on substrates and pick up colloidal cargoes in two different strategies.
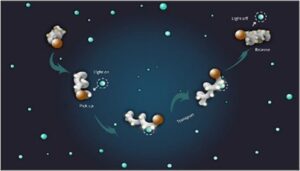
This was achieved by combining optical near field, thermoplasmonics, magnetic propulsion, optofluidics and nanofabrication. The first invention is termed as Mobile nanotweezers (MNTs, 2018) that integrate plasmonic nanostructures with magnetic, helical nanoswimmers for remotely controlled manipulation of nano-objects within bulk fluid under optical illumination.
The other one is Active Colloidal Tweezers (ACTs, 2019) where we have reported an all-optical dynamic manipulation platform based on a synergy between far- and near-field optical focusing. These techniques allow pickup, transport, delivery, and on-chip assembly of submicron sized cargoes, including fluorescent nanodiamonds and living bacteria with great speed and control that were not possible otherwise.
